Сторінка
4
а отже для полігонометрії 4 класу при найбільшій довжині сторони S=3 км
![]()
при середній довжині сторони S=500 м
![]() ,
,
при найменшій стороні S=250 м
![]()
Точності центрування 1,7 мм і 0,85 мм можна досягнути оптичним виском.
Аналогічні розрахунки можна зробити для полігонометрії 1 і 2 розряду.
Помилка за неточність центрування теодоліта
Нехай 1 — центр пункта 1, 2 — центр пункта 2, на який вимірюється напрямок з пункта 1, Т — точка фактичного стояння теодоліта, який встановлений над точкою 1 з помилкою me, яка на рис. 3.7 зображена відрізком 1Т.
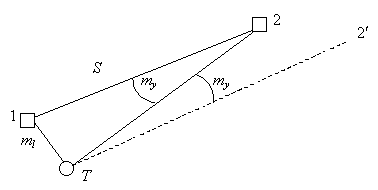
Рис.3.9. Помилка за неточність центрування теодоліта
За рахунок помилки центрування теодоліта me замість напряму 1–2 виміряємо напрям Т-2, тоді помилка у виміряному напрямі буде виражена кутом mц між напрямом Т-2 і напрямом Т-2′, проведеним у точці Т паралельно напряму 1–2.
Цей же кут знаходиться у видовженому трикутнику 1Т2 в точці 2.
Із трикутника 1Т2 запишемо
|
|
(3.47) |
або
|
|
(3.48) |
Формула (3.48) показує, як впливає помилка центрування теодоліта ml на помилку в напрямі mц.
Задаючись середньою квадратичною помилкою впливу одного джерела на вимірювання напряму, можна встановити середню квадратичну помилку, з якою необхідно центрувати теодоліт над центром пункта
|
|
(3.49) |
 ,
, а отже для полігонометрії 4 класу, виконавши розрахунки, як і для помилки редукції, знайдемо що при найбільшій довжині сторони (S=3 км) теодоліт необхідно центрувати з помилкою 10.2 мм, що може бути забезпечено нитяним виском, при середній стороні S=0.5 км з помилкою1.7 мм, при найменшій стороні S=0.25 км з помилкою 0.8 мм, що може бути забезпечено оптичним виском.
Розрахунки для полігонометрії 1 і 2 розряду пропонуємо виконати самостійно.
Триштативна система вимірювання кутів
З метою ослаблення помилок центрування і редукції і зменшення трудомісткості робіт при прокладанні полігонометричних ходів застосовують триштативну систему.
Вона полягає в тому, що на трьох сусідніх точках А, В, С ходу встановлюються три штативи з закріпленими в них трегерами (рис. 3.8).
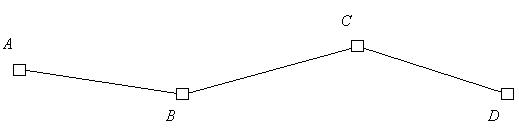
Рис. 3.10. Триштативна система
На задньому А і передньому С встановлюються марки, на середньому В — теодоліт. Після вимірювання кута в т. В, штативи в т. В і т. С з трегерами залишаються в тому ж положенні, а штатив з т. С з трегером переносять в т. D.
Теодоліт виймають з трегера в т. В, переносять і встановлюють в трегер, що залишився на т. С; в трегер, що залишився на т. В встановлюють марку, яку вийняли з трегера в т. А і перенесли на т. В. Марку, яку вийняли з трегера на т. С встановлюють в трегер на т. D.
Таким чином, якщо прилади попередньо від’юстовані, в точці В вісь обертання марки на наступній станції співпадає з віссю обертання теодоліта на попередній станції, а в точці С — вісь обертання теодоліта на наступній станції співпадає з віссю обертання марки на попередній станції, тобто операція центрування приладів на точках В і С на двох суміжних станціях виконується один раз.
Зменшення кількості операцій центрування приводить до зменшення помилок за центрування приладів і прискорює процес прокладання ходу.
Для прискорення кутових вимірів доцільно мати ще 1–2 запасних штативи з трегерами, які в той час коли виконуються виміри на попередніх точках, центрують з допомогою перевіреного оптичного виска в наступних точках ходу.
Помилка приладу
Помилка приладу залежить від спроможної здатності труби теодоліта та інших його конструктивних особливостей. Величину цієї помилки можна обчислити, виходячи з середньої квадратичної помилки вимірювання кута в одному заході, яка залежить від типу теодоліта, і кількості заходів вимірювання кута.
Формула для обчислення середньої квадратичної помилки приладу має вигляд
|
|
(3.50) |
де m1зах — середня квадратична помилка вимірювання кута в одному заході теодолітом, згідно з паспортом.
Інші реферати на тему «Географія фізична, геологія, геодезія»:
Обґрунтування параметрів формули швидкості руслового добігання весняного стоку в басейні р.Сейм
Технологія вирощування лісових культур на рекультивованих землях
Енергетичний потенціал відновлюваних та нетрадиційних джерел енергії України: енергія вітру, сонячна енергія ,енергія малих рік, енергія біомаси
Управління земельними ресурсами в умовах реформування земельного ринку
Сучасний екологічний стан земельних ресурсів і першочергові завдання щодо їх відтворення