Сторінка
3
Для видовжених ходів L»[S]. З врахуванням цього, отримаємо з формули (3.38)
|
|
(3.39) |
або
|
|
(3.40) |
Формула (3.40) являє собою залежність між точністю кутових вимірів mb і точністю ![]() полігонометричних ходів.
полігонометричних ходів.
Виконавши розрахунки за формулою (3.40), знайдемо, що в полігонометрії 4 класу кути необхідно вимірювати з середньою квадратичною помилкою
![]() .
.
Тут n=15 — максимальна кількість сторін у ході.
Отримаємо аналогічно для 1-го розряду mb=5″,8, для 2-го розряду: mb=12″,5.
Інструкція [1] вимагає виконувати кутові виміри з середніми квадратичними помилками 3″, 5″ і 10″ у 4 класі, 1 і 2 розряді відповідно.
Відзначимо, що для 4 класу ця точність “Інструкцією” дещо занижена.
3.4.6.2. Джерела помилок кутових вимірів. Обґрунтування величини впливу одного джерела помилок
|
На точність кутових вимірів здійснюють вплив такі помилки: | |
|
за неточність центрування марки, (помилка за редукцію) |
mред, |
|
за неточність центрування теодоліта |
mц, |
|
приладу |
mпр, |
|
власне виміру |
mвл.вим, |
|
зовнішніх умов |
mзовн, |
|
вихідних даних |
mвих. |
Якщо допустити принцип однакових впливів, тобто
|
mред=mц=mпр=mвл.вим.=mзовн=mвих=mі, |
(3.41) |
Тоді можемо записати
|
|
(3.42) |
де
mb — середня квадратична помилка вимірювання кута,
mi — середня квадратична помилка впливу одного джерела.
З формули (3.42)
|
|
(3.43) |
Задаючись середніми квадратичними помилками вимірювання кутів у полігонометрії, отриманими вище, за формулою (3.43) обчислимо середню квадратичну помилку впливу одного джерела помилок на вимірювання кутів в полігонометрії 4 класу
![]() ,
,
в полігонометрії 1 розряду,
![]() ,
,
в полігонометрії 2 розряду
![]() .
.
Враховуючи, що кут складається з 2 напрямків, середня квадратична помилка впливу одного джерела для одного напрямку буде в ![]() разів менша, тобто становитиме 0″,7; 1″,7; 3″,6 для полігонометрії 4 класу, 1 розряду, 2 розряду відповідно.
разів менша, тобто становитиме 0″,7; 1″,7; 3″,6 для полігонометрії 4 класу, 1 розряду, 2 розряду відповідно.
3.4.6.3. Аналіз впливу окремих джерел на точність кутових вимірів
Помилка за неточність центрування марки (помилка редукції)
Нехай 1 — точка стояння теодоліта над центром пункта 1, 2 — центр пункта 2, на який вимірюється напрямок з пункта 1. М — точка фактичного стояння марки, яка встановлена над точкою 2 з помилкою ml1, яка на рис. 3.8 зображена відрізком 2М.
За рахунок помилки центрування марки ml1 (помилки редукції) замість напряму 1–2 виміряємо напрям 1–М, тобто помилка у виміряному напрямку за редукцію буде виражена кутом mред.
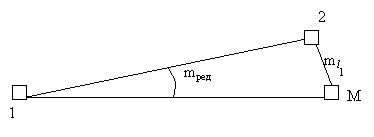
Рис. 3.8 Помилка редукції
З рис. 3.8 можемо записати
|
|
(3.44) |
або, враховуючи малу величину кута mред,
|
|
(3.45) |
Формула (3.45) показує, як впливає помилка центрування марки ml1, на помилку в напрямі mред.
Задаючись середньою квадратичною помилкою впливу одного джерела на вимірювання напряму, можна встановити середню квадратичну помилку з якого необхідно центрувати марку над центром пункта
|
|
(3.46) |
 ,
, Інші реферати на тему «Географія фізична, геологія, геодезія»:
Особливості вирощування сільськогосподарських культур на рекультивованих землях
Створення планових геодезичних мереж методом тріангуляції
Аналіз існуючих підходів до районування водосховищ та пропозиції по його удосконаленню
Принципи і методи створення рослинного покриву
Земельний кадастр і використання земель Городницької сільської ради Городенківського району Івано-Франківської області